OTC Flying-Argo
Bundesministerium für Bildung und Forschung (BMBF)
01.10.2021 - 30.09.2024
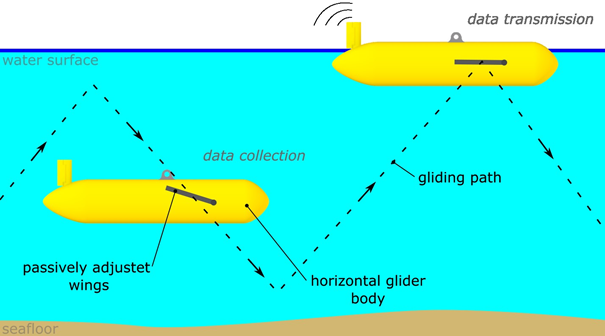
Das Projekt OTC Flying Argo beschäftigt sich mit der Entwicklung eines Open Source Unterwassergleiters dessen Fortbewegung auf einem neuartigen „passive flapping-foil“ Gleitkonzept basiert. Anders als bei herkömmlichen Gleitern bleibt der Körper des Systems während des gesamten Gleitfluges in einer waagerechten Position, während sich die Flügel passiv entsprechend der Strömungsrichtung anstellen um den notwendigen Vortrieb zu generieren (siehe Abb. 1).
Im Vergleich zu herkömmlichen Gleitern verbessert das Fortbewegungsprinzip auf ebenem Kiel die Nutzerfreundlichkeit und Modularität des Systems, da eine erhöhte hydrostatische Stabilität genutzt werden kann. Für die Nutzer*innen resultiert hieraus ein verringerter Aufwand während der Fahrzeugtarierung und Payloadimplementierung im Rahmen der Missionsvorbereitung. Weiterhin ist das System besser für die Nutzung neigungsempfindlicher Sensorik geeignet als heutige Gleiter.
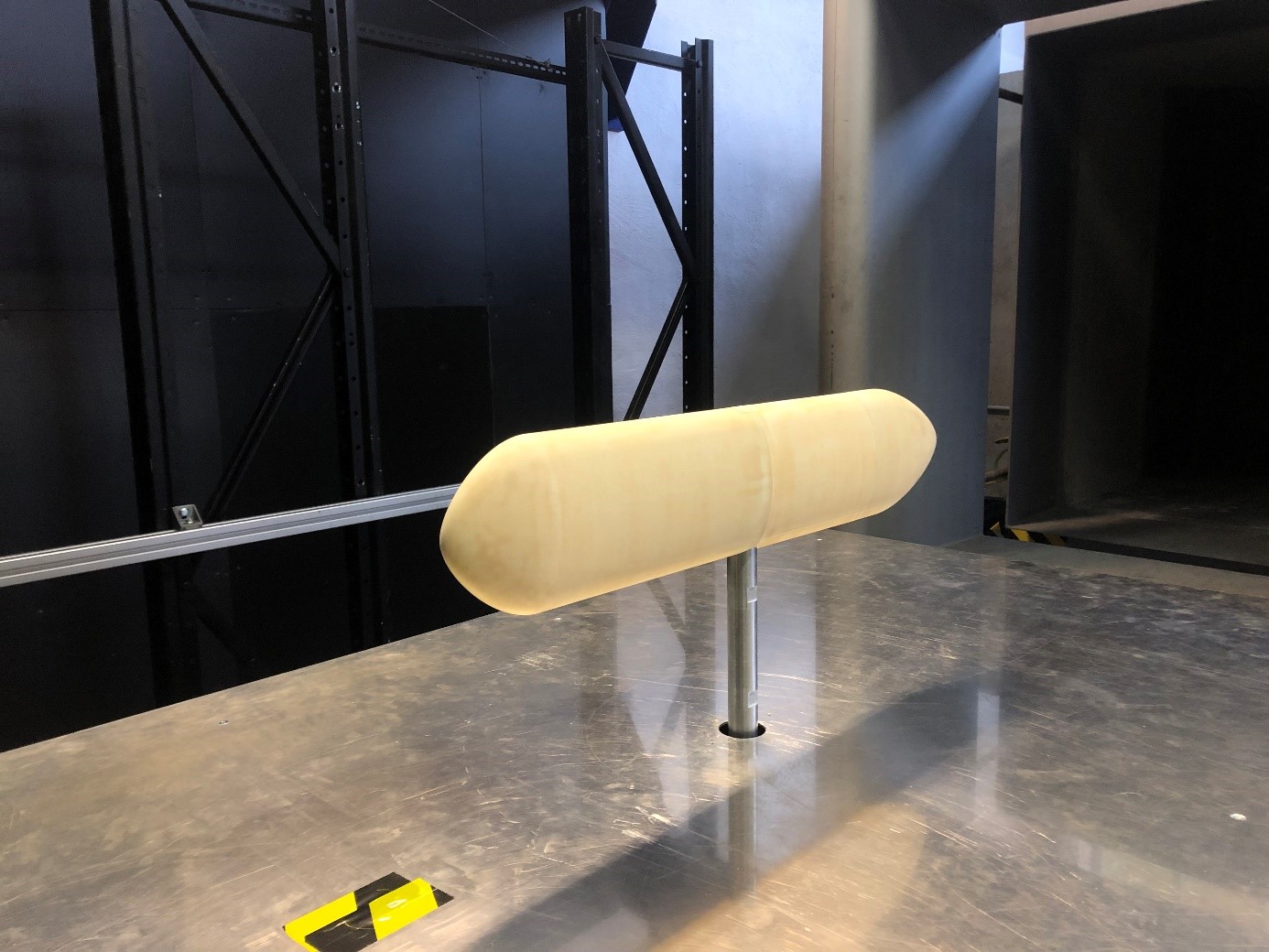
Da aus dem waagerechten Gleiterkörper eine in Anströmrichtung vergrößerte Schattenfläche und somit ein erhöhter hydrodynamischer Widerstand resultiert, muss ein besonderes Augenmerk auf die strömungsmechanische Optimierung der Gleiterhülle gelegt werden. Aus diesem Grund werden entsprechende Simulationen und experimentelle Untersuchungen durchgeführt (siehe Abb.2).
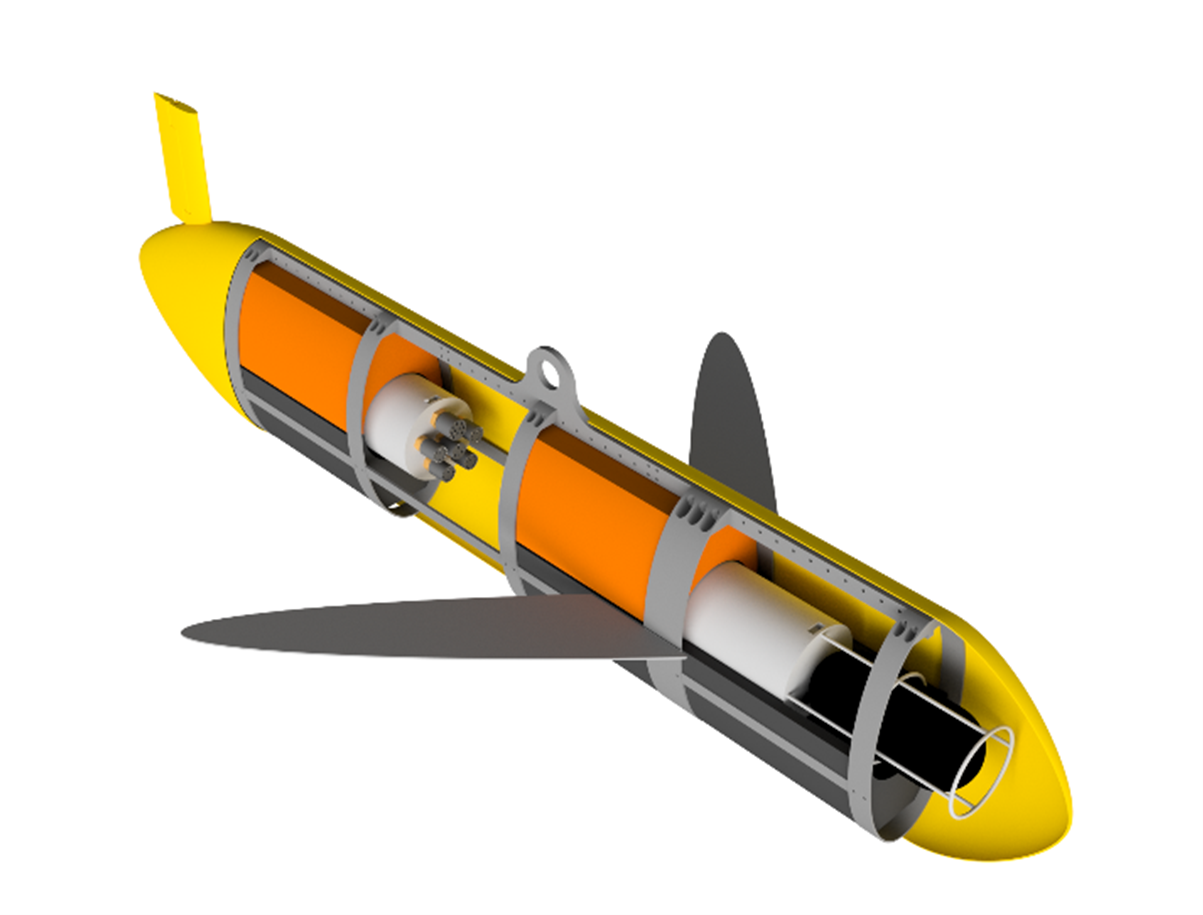
Neben dem neuartigen Gleitkonzept werden weitere Maßnahmen ergriffen um die Modularität und Nutzerfreundlichkeit zu maximieren. So wird neben der Implementierung eines intelligenten Navigations- und Regelungssystems auch ein weitgehend druckneutrales Systemdesign realisiert (siehe Abb. 3).
Der Gleiter wird in seiner ersten Ausbaustufe auf eine Tauchtiefe von 1000 Metern ausgelegt. Aufgrund des weitgehend druckneutralen Ansatzes sind spätere Erweiterungen auf größere Tauchtiefen ohne aufwendige Redesigns möglich. Das Systemgewicht liegt bei ca. 60 kg und inkludiert eine Payloadkapazität von 5 kg. Der Gleiter kann somit von wenigen Personen per Hand bewegt und flexibel eingesetzt werden.
Das System kann sowohl für Einzelmissionen und großskalige Monitoringaufgaben in der Meeresforschung, als auch zu wirtschaftlichen Zwecken, beispielsweise bei der Überwachung und Wartung von Offshorestrukturen genutzt werden. Im Rahmen eines open Innovation Prozesses werden weitere Informationen sowie ein Open Source Basismodell nach Fertigstellung des Projektes unter https://github.com/jonasthyrann/FlyingArgo zur Verfügung gestellt.
- Universität Rostock, Lehrstuhl Meerestechnik, Justus-von-Liebig-Weg 2, 18059 Rostock https://www.lmt.uni-rostock.de
- Universität Rostock, Institut für Automatisierungstechnik, Richard-Wagner-Straße 31, 18119 Rostock, https://www.rt.uni-rostock.de
- BaltiCo GmbH, Bützower Straße 1d, 18239 Hohen Luckow http://www.baltico.eu

